Challenge
The goal of this project was to design and build a self-propelled robot capable of autonomously scoring as many goals as possible within one minute, without the use of powered wheels. The design needed to obey a 90-degree starting leg rule, move efficiently in both directions, and remain compact, stable, and lightweight.
I set out to create a robot that maximized speed, accuracy, and mechanical creativity, focusing on a novel wheel design that could assemble itself mid-motion to provide full ground contact and smooth, continuous travel.
Summary and Details
The Ping Pong Bot integrates mechanical design, 3D printing, and basic mechatronics to achieve consistent motion and goal-scoring precision. Every design decision centered around two key goals — reduce weight and increase speed — while maintaining control and repeatability.
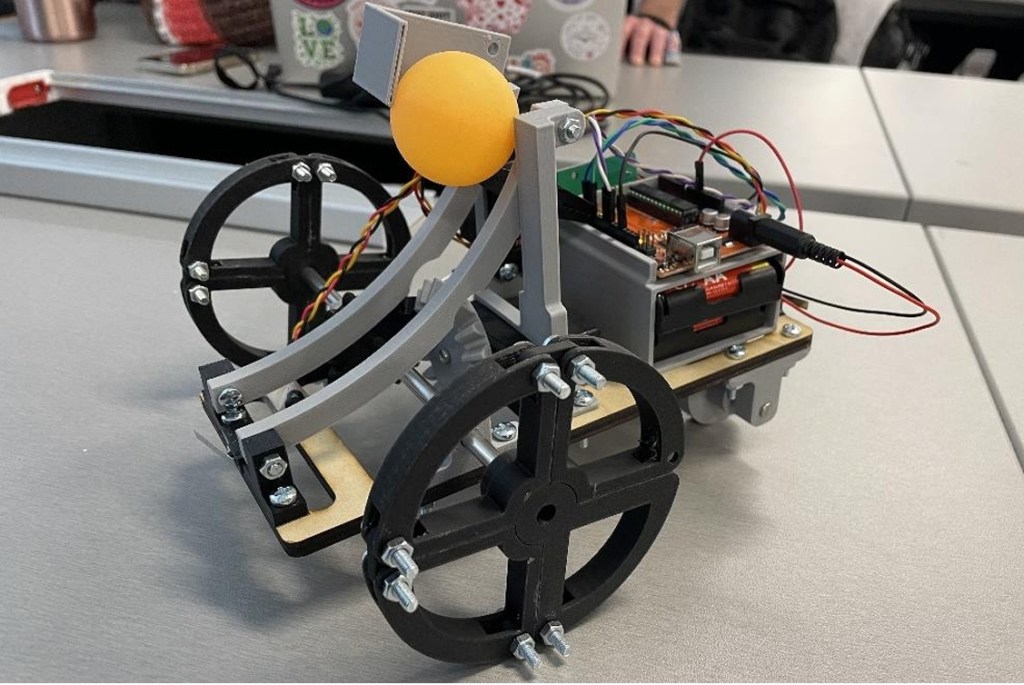
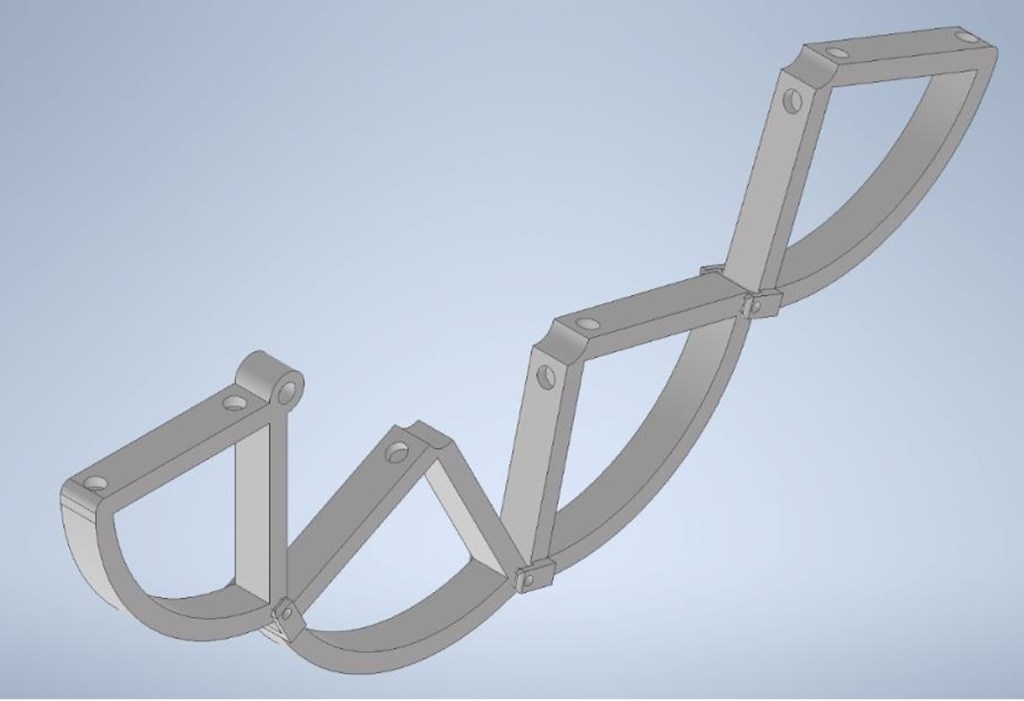
To accomplish this, I developed a self-assembling wheel system that connects four magnetic leg segments into a circular form once rotation begins. This mechanism transforms the robot’s legs into efficient wheels while maintaining compliance with the starting constraints. The robot also uses a servo-actuated ramp gate to release a ping pong ball at the end of each run, allowing for quick, repeatable goals.
Performance testing showed:
- 7 runs and 7 goals in 60 seconds, with 100% shot accuracy.
- Measured speed: 0.233 m/s (75% of theoretical speed).
- Total weight: 810 g (lighter than average competing designs).
Ping Pong Bot Design
The design approach focused on weight reduction, motion reliability, and manufacturability.
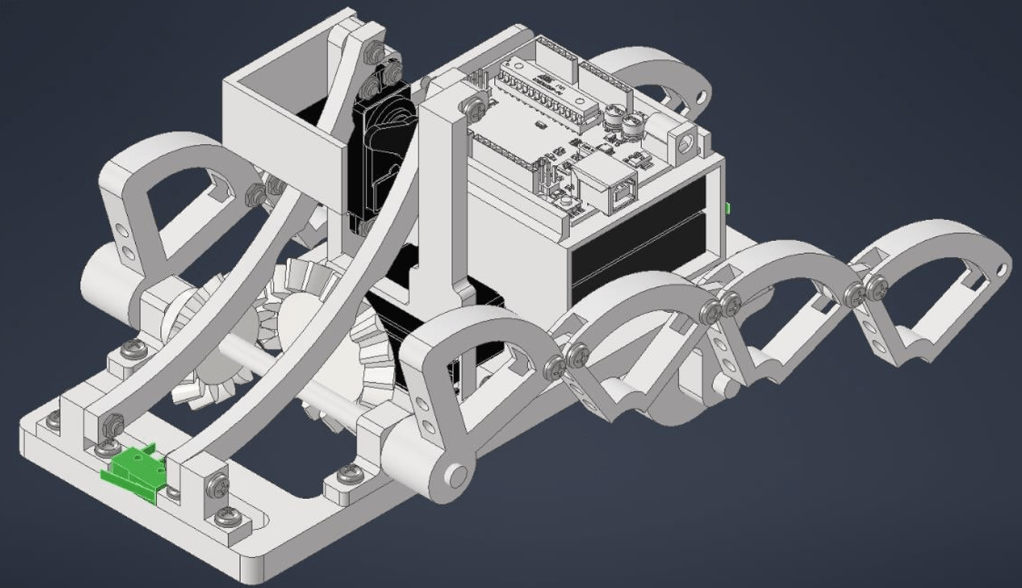
The chassis was laser-cut with strategic cutouts to reduce unnecessary mass while preserving structural rigidity. Each component was modeled in CAD with print efficiency in mind, and 3D-printed using lightweight PLA material.
The wheel system became the defining feature — four magnetically connected segments that lock together dynamically as the bot moves. Once fully formed, these “legs-turned-wheels” maintain 100% ground contact, maximizing forward traction and directional stability.
The shooting mechanism was a compact servo gate releasing the ping pong ball down a ramp. Each shot was designed to trigger automatically at the end of the bot’s run, enabling fast turnaround and precise timing.
Testing and Performance
To validate the design, I ran multiple timed trials and compared theoretical calculations with real-world results.
| Metric | Theoretical | Actual | Difference |
| Angular Speed | 8.05 rad/s | 6.26 rad/s | -22% |
| Linear Velocity | 0.313 m/s | 0.233 m/s | -25% |
| Total Distance (1 Min) | 14 m | 14 m (7 Trips x 2 m) | _ |
| Accuracy | 100% | 100% | _ |
The reduced speed was primarily caused by wheel slippage during assembly and slight delays from the limit switch trigger. However, despite the speed drop, the bot maintained full scoring consistency. Its reliability came from consistent ground contact and balanced weight distribution, which prevented drift or veering.
Motor speed = 0.13sec/60deg => 8.05 rad/s
Gear ratio = 18/14 = 1.286
8.05/Wout =1.286 => Wout = 6.26 rad/s
Vtheoretical = wr = (6.26rad/s)(0.05m)
Vtheoretical = 0.313m/s
Distance = 7trips x 2m = 14m
Time = 60s
Vactual = 14m/60s = 0.233m/s
Vactual = 0.233m/s
Reflection and Improvements
This project reinforced the importance of iterative design, testing, and optimization. While the final build achieved its goals of reliability and accuracy, I identified several clear paths for refinement:
- Reduce weight by replacing the 6 mm wooden chassis with a 3 mm acrylic or plywood base.
- Simplify rear wheels using direct-mounted bearings instead of a steel axle, reducing 25 g.
- Convert shooting system to a passive ramp design that triggers through inertia, eliminating one servo motor.
- Improve traction with soft rubberized wheel edges to reduce slip and recover the 25% speed loss.
With these optimizations, the next version would likely exceed 12–13 trips per minute — effectively doubling throughput while maintaining mechanical simplicity.